「AutoFork」は自律走行技術を活用した革新的な自動フォークリフトです。レーザー誘導方式を採用した独自の自律走行アルゴリズムと、画像認識技術により、多数のパレットを一括で認識・搬送します。
さらに「AutoFork」は人の作業を記憶し、パレット搬送を自動で行うプレイバック機能を備えています。
目次
◉AutoFork 機能紹介
1.自動走行
1.1 機能
自動走行によるパレット搬送
1.2技術
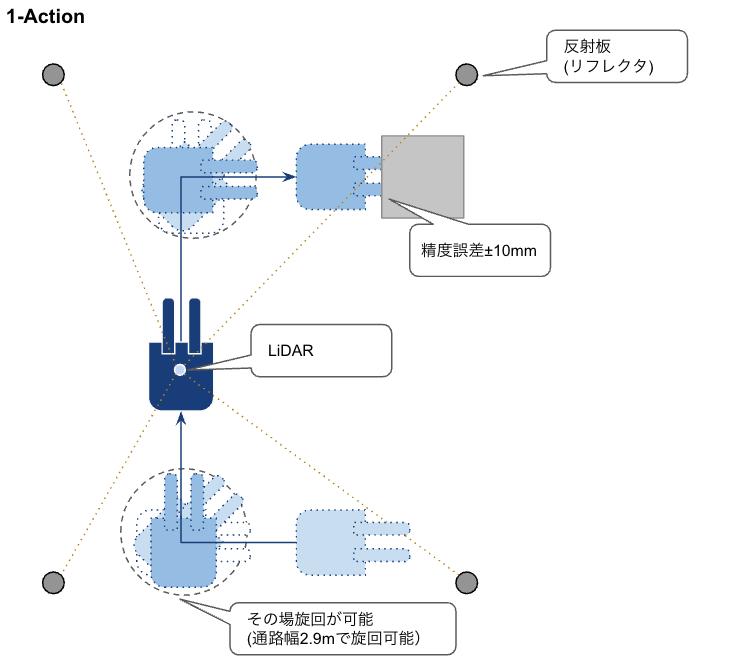
1.2.1その場旋回
- 直線走行とその場旋回が可能(通路幅2.9mで旋回可能)。このためAutoForkの走行ルート作成が容易。
1.2.1誘導方式と精度
- AutoForkのトップに設置されたLiDARが、施設内に設置された反射板(リフレクタ)位置を検出し、自己位置を推定する。
- 精度誤差±10mm
【解説図】
1.3 目標パレットへ精度±10mmでアプローチ ※動画速度:標準
2.複数パレット一括認識搬送
2.1機能
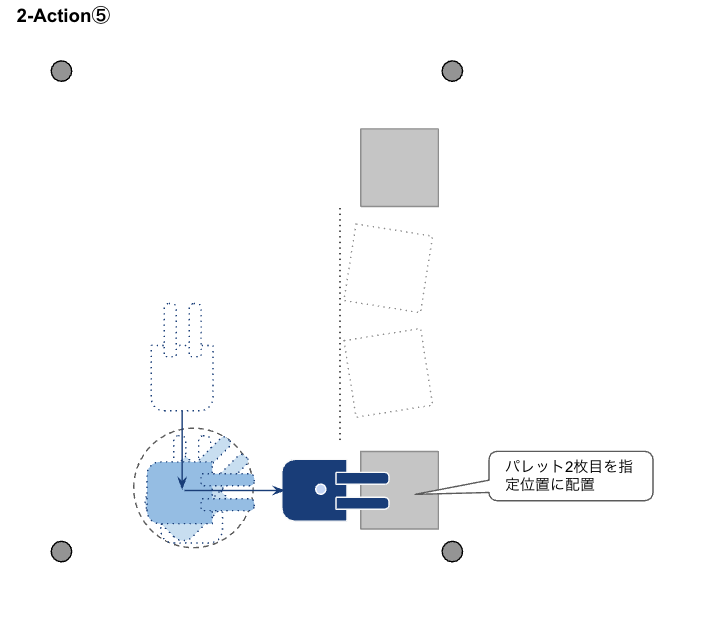
不整列に置かれた複数枚パレットを一括認識、搬送ルートの自動作成を行い、パレットを順次取得し搬送
2.2技術
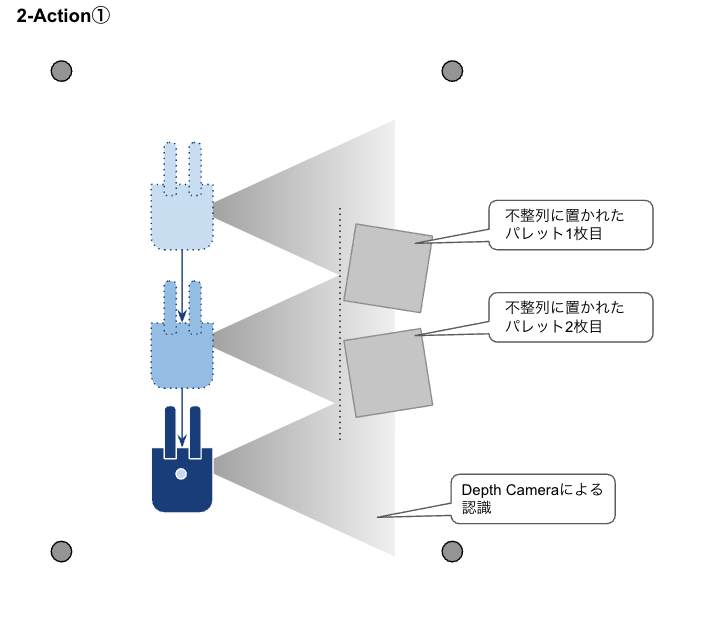
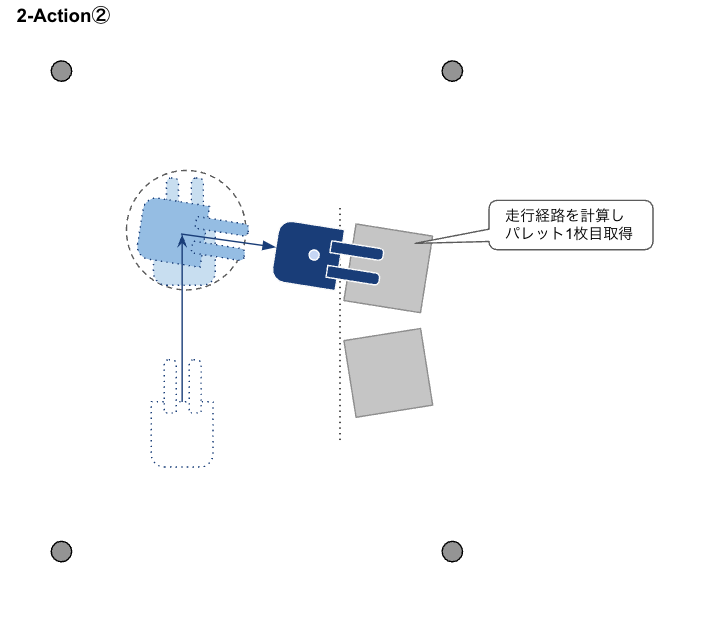
2.2.1パレット認識と走行経路の自動生成
- AutoForkに搭載されたDepth Cameraが不整列に置かれたパレット位置を認識した直後、
AutoForkがパレットのフォーク差し込み側面に対して直角となるように侵入角度を計算し走行経路を生成
- 精度誤差は±10mm
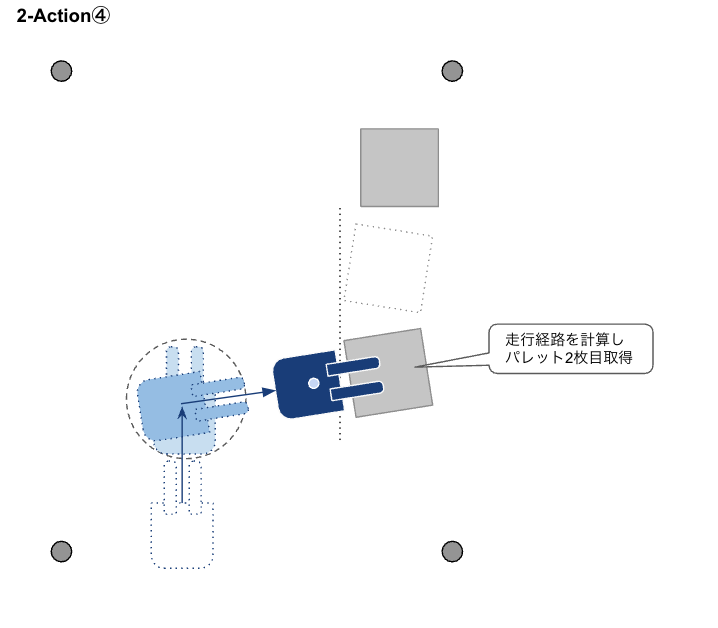
2.2.1複数パレットへの対応
- 複数枚のパレット認識搬送が可能
【解説図】

2.3 複数パレット一括認識搬送 ※動画速度:標準
3.プレイバック
3.1機能
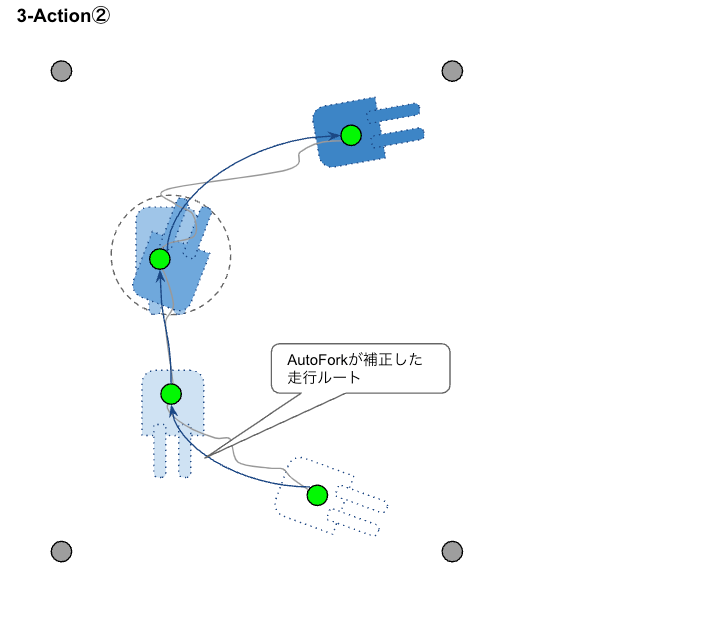
人が操作したフォークリフトのルートを、AutoForkがたどるプレイバック走行
3.2技術
- 人がAutoForkを手動モードで操作をし、AutoForkは走行経路を記憶する。AutoForkは人が操作した走行経路を補正し、滑らかな走行経路を生成し走行をする
【解説図】

3.3 人の作業を補整して経路生成 プレイバック機能 ※動画速度:標準
お問い合わせ
- 導入検討・お見積り依頼
- 製品に関する質問
- 製品デモや実機の見学
など、お問い合わせは以下リンクよりお願いいたします。