現場がつくる、自動搬送エリア。
AutoForkの「反射ポールマップ編集機能」により、
ユーザー自身で走行エリアの作成・編集が可能になりました。
反射ポールマップ編集機能動画
実際の操作の流れを動画にまとめています。動画(約2分20秒)を通じて反射ポールマップの編集の流れをご確認ください。
【自動フォークリフト「AutoFork」】反射ポールマップ編集機能|ユーザー自身で走行エリアを構築可能なAGF
https://www.youtube.com/watch?v=v_m-K_wYmkI
反射ポールマップ編集機能とは
AutoForkが認識する反射ポールを活用し、
ユーザー自身で走行エリアをゼロから登録・編集できる機能です。
- 外部エンジニア不要&現場主導で設定可能
- 編集機能でレイアウト変更にも柔軟に対応
リフレクタ方式AGFにおいて、ユーザーが自動走行のエリア登録を行える点が特長です。
解決できる課題

💻 「設定変更に外部対応が必要」
↓
○解決:現場で即時変更可能

🔧 「レイアウト変更に時間がかかる」
↓
○解決:数時間〜1日で再設定

👨🏭 「専門知識が必要なのでは」
↓
○解決:専用UIで操作手順に沿って実行可能
マップ作成の流れ(4ステップ)
自動走行用の反射ポールマップ作成は、PCいらずで、本体操作とタッチモニターの操作だけで完了します。
1.反射ポールの設置
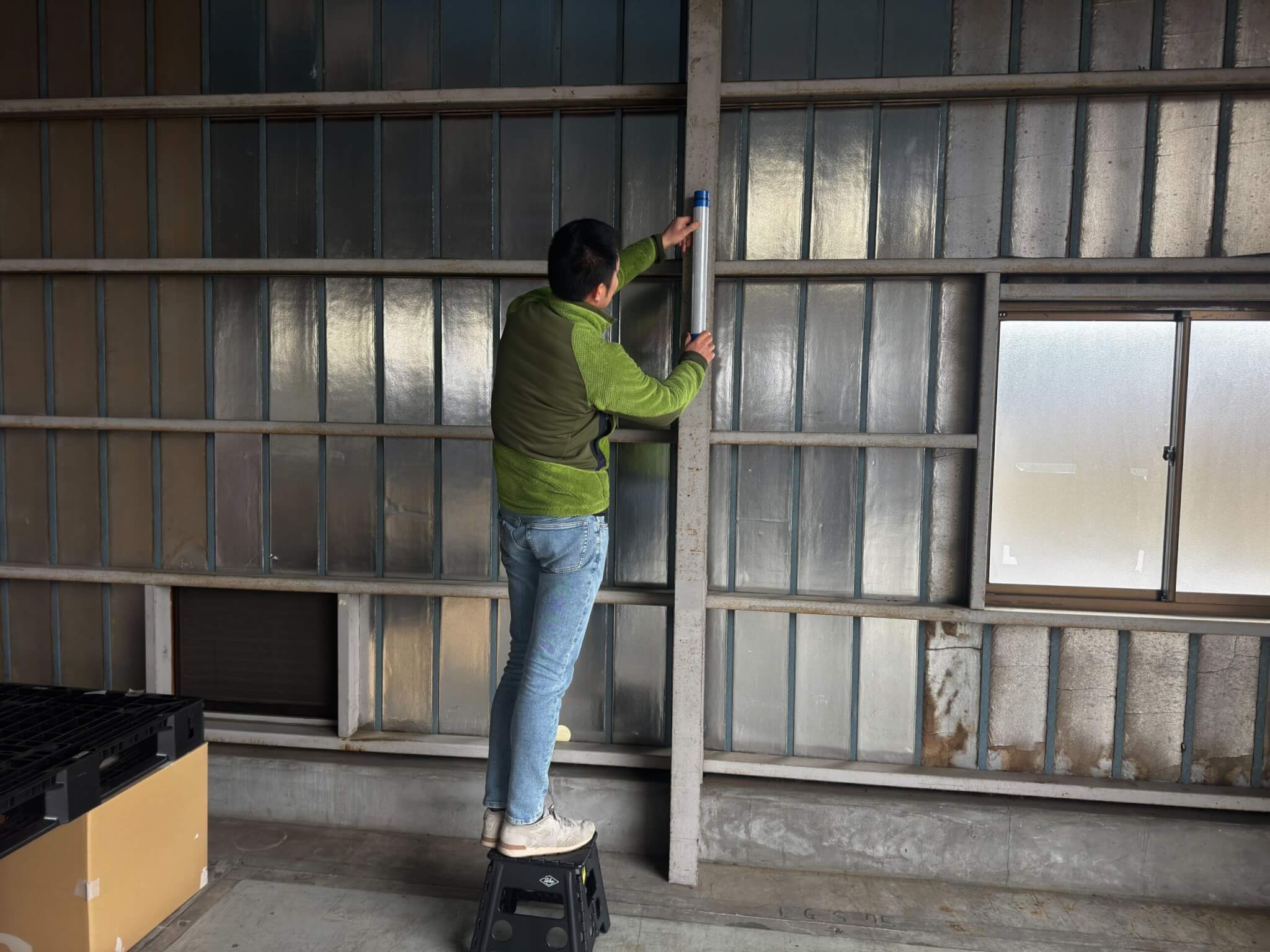
直径約6cm・高さ約50cmの反射ポールをセンサー高さ(約2.1m)に合わせて設置
2.走行エリアのスキャン

AutoForkを走行予定エリア内にて手動走行させ、エリアを建物形状と反射ポール位置情報を取得。
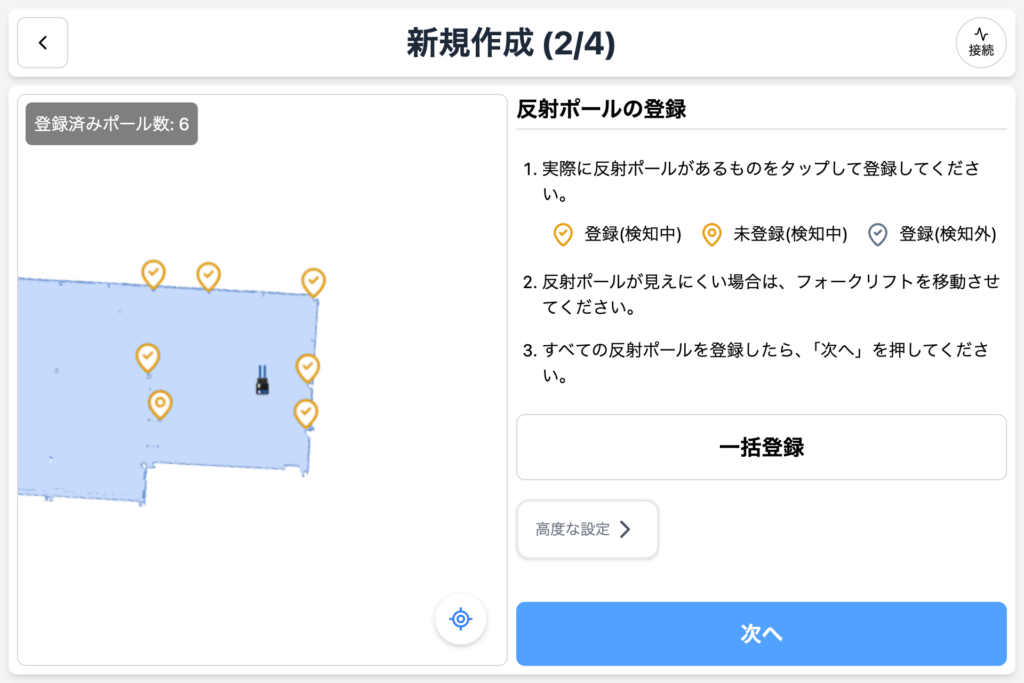
3.反射ポール登録
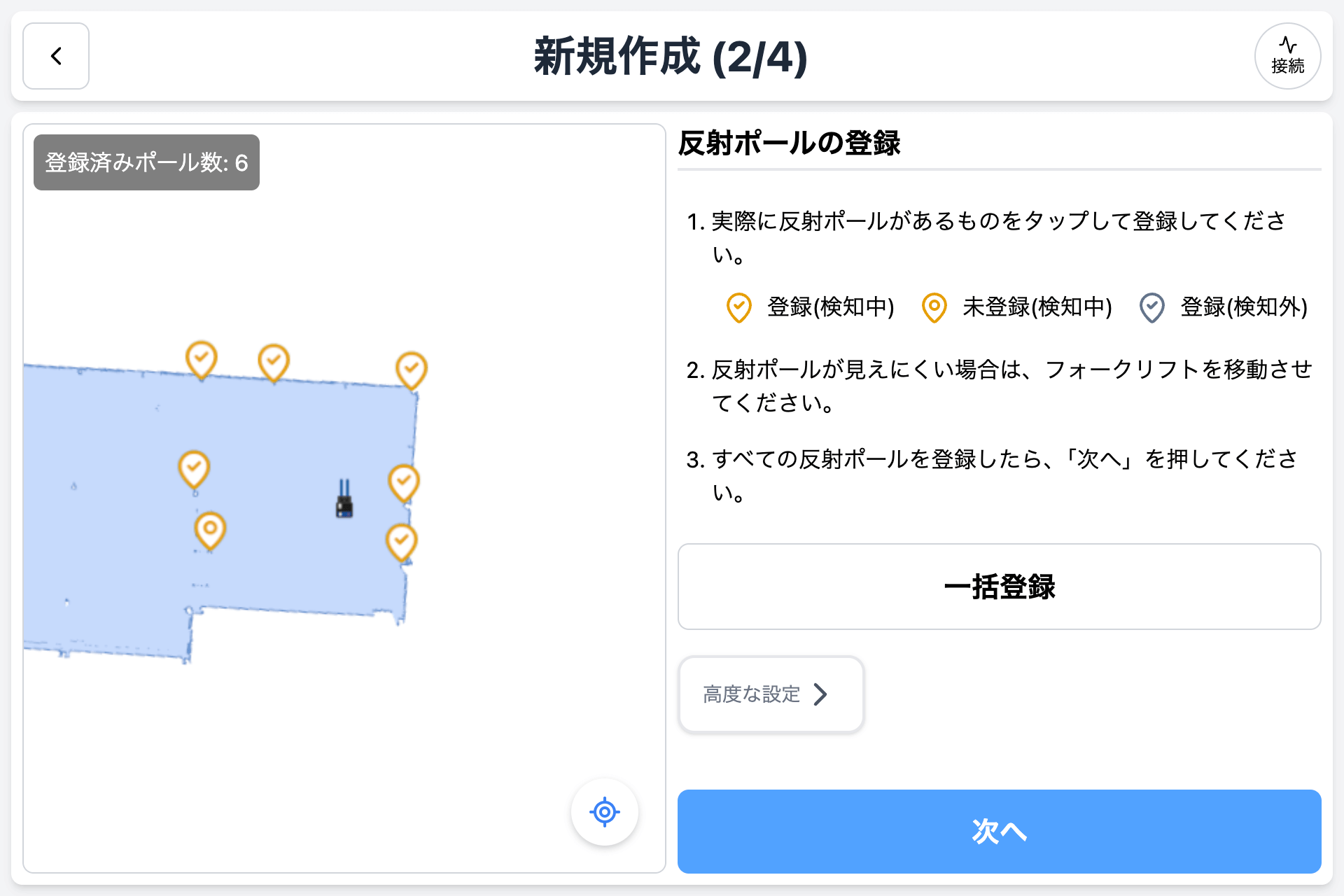
自動認識にて検出されたポールを選択してマップに登録。
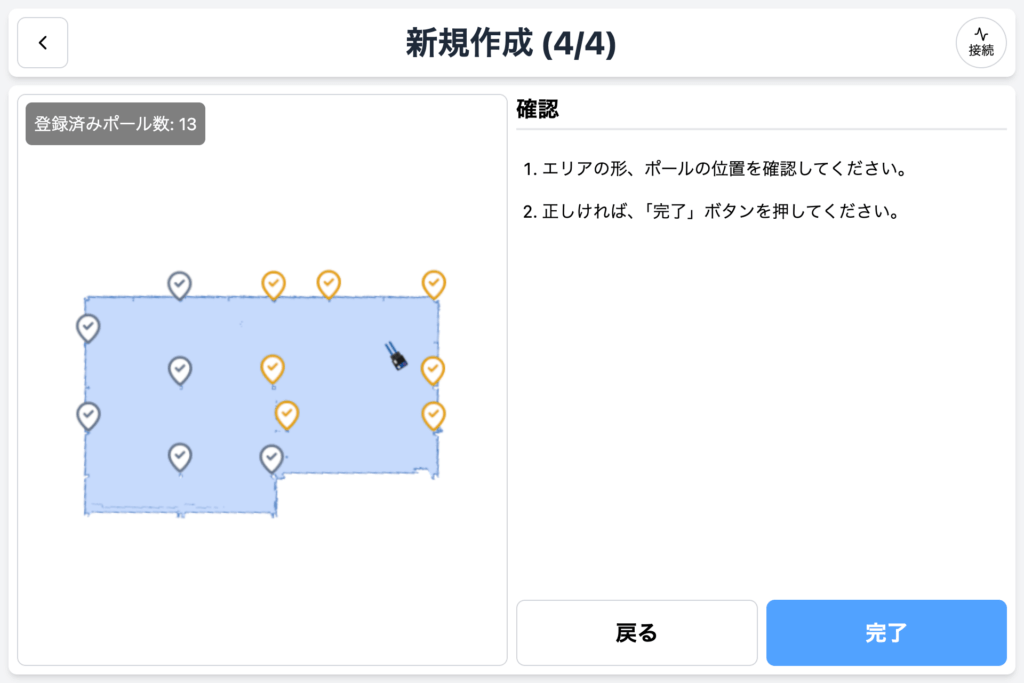
4.マップ登録
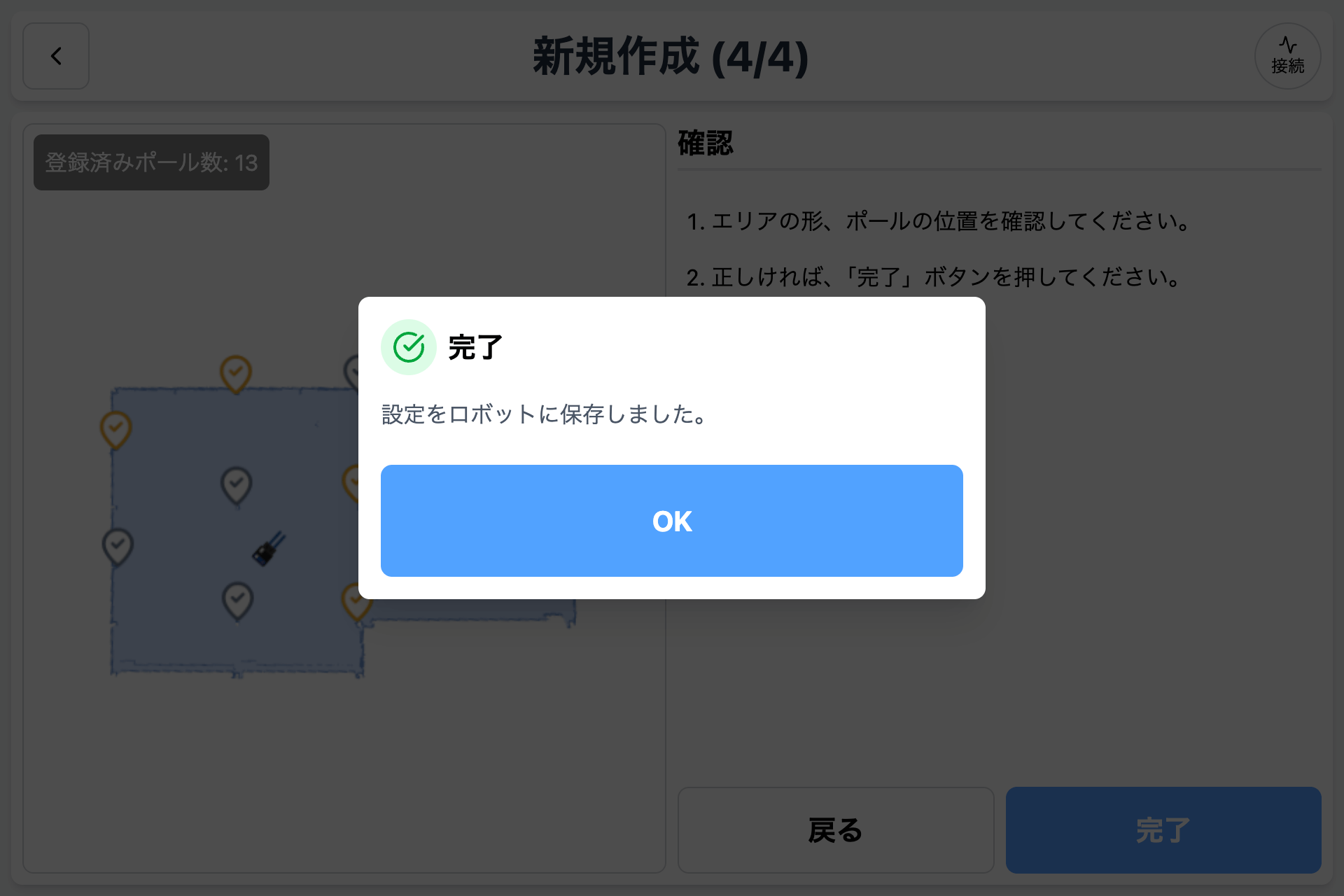
確認画面から本数と位置を確認し、本体へ登録
“現場が作れる操作感” を、あなた自身で確認。
AutoFork「反射ポールマップ編集&プレイバック機能」実機体験会
事前申込者限定で、本機能の体験会を行っております。
動画でご紹介した「反射ポールマップ作成機能」を、いち早くご体験ください。
体験会ではAutoForkの実機を使用しながら、マップの編集やプレイバック機能の体験など、ご自身で操作いただけます。
開催日: 2026年3月5日(木) より
(随時開催・ご希望の日時で調整。所要時間は1枠最大90分程度を想定)
場所: 株式会社ハクオウロボティクス 東浦和ベース
(埼玉県さいたま市緑区東浦和3-23-3) Google Map
参加費: 無 料
※体験会でAutoForkを操作できる方はフォークの特別教育受講者か免許保持者となります。
あらかじめご了承ください。